Mars Pathfinder Mission Description

Table of Contents
Mission Overview
The Mars Pathfinder Project was one of the first of the NASA Discovery
class missions. Discovery Program missions are defined as low cost
missions, (with a $150M FY'92 development cost cap), and a fast
schedule (less than 3 years development period). They have focused,
but significant, science objectives.
Mars Pathfinder placed a single vehicle on the surface of Mars, the
Mars Pathfinder Lander, which then deployed a microrover, called
variously 'Sojourner', the 'Microrover Flight Experiment', or the
'Mars Pathfinder Rover'. Several instruments were included on the two
spacecraft. The Sojourner carried three cameras, (two black & white
cameras on the front and one color camera in the rear), and the Alpha
Proton X-Ray Spectrometer (APXS). Sojourner's mobility provided the
capability of 'ground truthing' a landing area over hundreds of square
meters on Mars. The Lander investigated the surface of Mars with two
additional science instruments, a stereoscopic imager with spectral
filters on an extensible mast (Imager for Mars Pathfinder or IMP), and
the Atmospheric Structure Instrument / Meteorology package (ASI/MET).
Mars Pathfinder paved the way for a cost effective implementation of
future Mars lander missions as part of a comprehensive Mars
exploration program augmented by additional Discovery Program
missions.
The launch occurred December 4, 1996 on a McDonnell Douglas Delta II
7925 launch vehicle. The Earth-Mars trajectory was a Type 1 transfer
with a Mars arrival date of July 4, 1997. The landing site for Mars
Pathfinder was in the Ares Vallis region of Chryse Planitia at 19.17
degrees North latitude, 33.21 degrees West longitude. (See [GOLOMBEKETAL1997B] or the DATASET.CAT file on this CD-ROM for specifics.)
The Earth elevation angle at landing was 11 degrees and rising, and
the Sun was 30 degrees below the local horizon and rising. The
Earth-Mars range at arrival was 191,000,000 km (and increasing).
Required guidance, navigation, attitude control, telemetry, and power
generation functions during the 7 month cruise were provided by the
cruise stage. At Mars arrival, the cruise stage was jettisoned from
the entry capsule. The entry capsule entered the Martian atmosphere
directly from the Earth-Mars transfer orbit at a velocity of 7.6 km/s.
The lander velocity was reduced from this high entry speed through the
sequential application of aerodynamic braking by a Viking heritage
aeroshell and parachute, propulsive deceleration using small solid
tractor rockets, and airbags to nullify the remaining vertical and
horizontal velocity components at surface impact. Key engineering
status information was collected and returned in near real time to the
extent possible during entry and descent. In addition, all
engineering and science data obtained during the critical entry,
descent, and landing phase were recorded for playback at the
initiation of lander surface operations.
The principle surface operations activities were return of engineering
data characterizing the performance of the lander system in the
Martian environment, return of science data obtained from the imaging,
meteorology, and spectroscopy instruments, and operation of the rover
to deploy instruments and conduct science and technology
experiments.
Seven mission phases, including the extended phase, were defined to
describe the periods of activity during the mission. Brief summaries
of the activities in each phase are described below.
The mission has been described in many papers including a February,
1997 special issue of the Journal of Geophysical Research and a
December, 1997 special issue of Science. Sometime in the latter half
of 1998 there will be another special issue of the JGR discussing the
results of the mission.
Mission Phases
DEVELOPMENT
The development phase began with the start of mission funding in 1993.
During this phase, the science and technology requirements were
analyzed and the spacecraft and its components were designed. The
instruments and spacecraft were fabricated and tested before delivery
to the Eastern Test Range. The spacecraft trajectory and mission
operations were also determined during this period.
| Spacecraft Id | MPFL |
| Target Name | MARS |
| Mission Phase Start Time | 1993-11-01 |
| Mission Phase Stop Time | 1996-08-12 |
| Spacecraft Operations Type | LANDER |
PRELAUNCH
The prelaunch phase extended from delivery of the spacecraft to the
Eastern Test Range (ETR) until initiation of the terminal countdown
three hours prior to launch. Principle activities performed during
this phase included final assembly and checkout of the spacecraft,
mating with the Payload Assist Module-D (PAM-D), propellant loading,
and integration of the spacecraft/PAM-D stack on the Delta. In
addition, there was an extensive review cycle required prior to
launch.
| Spacecraft Id | MPFL |
| Target Name | MARS |
| Mission Phase Start Time | 1996-08-12 |
| Mission Phase Stop Time | 1996-12-04 |
| Spacecraft Operations Type | LANDER |
LAUNCH
The launch phase extended from the initiation of the terminal
countdown through spacecraft separation from the upper stage. Mars
Pathfinder was launched December 4, 1996, at 6:58 am UTC (1:58 am EST)
from launch complex 17B at Cape Canaveral, FL. The launch azimuth was
95 degrees. The boost portion of the launch vehicle trajectory took
approximately 10 minutes. Injection occurred about one hour later
after an extended coast phase. After third stage burnout, the upper
stage despun the stack using a yo-yo despin system. Separation
occurred approximately 75 minutes after launch.
| Spacecraft Id | MPFL |
| Target Name | MARS |
| Mission Phase Start Time | 1996-12-04 |
| Mission Phase Stop Time | 1996-12-04 |
| Spacecraft Operations Type | LANDER |
CRUISE
The cruise phase started when the spacecraft separated from the upper
stage and ended twelve hours prior to entry. The cruise phase was
subdivided into three subphases: near Earth, Earth-Mars transfer, and
Mars approach. The near Earth subphase started at separation and
ended the day after the first Trajectory Correction Maneuver (TCM),
which occurred on January 10, 1997. Major activities performed in
this subphase were initial link acquisition, initiation of the nominal
cruise attitude profile, checkout of the spacecraft engineering
functions, rover and instrument health checks, and TCM-1. The
Earth-Mars transfer subphase started at the end of the near-Earth
subphase and extended through May 20, 1997 (45 days prior to arrival).
Activities carried out during this subphase included routine
spacecraft health and performance monitoring, tracking data
acquisition for navigation, and the second and third TCM's (performed
on February 3 and May 7, respectively). The Mars approach subphase
started on May 21, 1997 and ended twelve hours prior to entry on July
4, 1997. TCM-4 (on June 25), the entry attitude turn (where the
spacecraft was placed into the desired entry attitude), and
preparations for Mars atmospheric entry were completed during this
subphase.
Because the instruments were all enclosed within the folded-up lander,
no science investigations were conducted during cruise, except for
instrument health checkouts.
| Spacecraft Id | MPFL |
| Target Name | MARS |
| Mission Phase Start Time | 1996-12-04 |
| Mission Phase Stop Time | 1997-07-04 |
| Spacecraft Operations Type | LANDER |
|

|
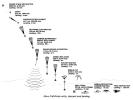
ENTRY, DESCENT, AND LANDING
The entry, descent and landing (EDL) phase of the mission started 12
hours prior to entry. The spacecraft was in the autonomous EDL
control mode during this period. This phase ended when the airbags
were fully retracted, the petals were deployed, and the lander
transitioned from the EDL mode to sequence control. This occurred 87
minutes after landing. The EDL phase was divided into three
subphases: entry, terminal descent, and EDL surface.
The entry subphase extended from the start of the EDL phase through
parachute deployment. The exact time of parachute deployment was
calculated from on-board accelerometer measurements, and occurred at
4:54:41 pm UTC (9:54:41 am PDT) on July 4, 1997. Activities in this
period included cruise stage separation, peak aerodynamic heating and
deceleration, acquisition of engineering and science accelerometer
data, and parachute deployment.
The terminal descent subphase started at parachute deployment and
ended when the lander rolled to a stop on the surface of Mars. The
landing occurred at 4:56:55 pm UTC (9:56:55 am PDT) July 4, 1997; the
true local time at the landing site on Mars was 2:58 am. The lander
rolled for about two minutes before finally coming to rest about 12
miles southwest of its targeted landing spot. It rested on the
surface at a very slight tilt of about 2.5 degrees. Heatshield
separation, bridle deployment, radar altimeter data acquisition,
airbag inflation, RAD (rocket assisted descent) motor ignition, and
impact were the key activities of this subphase.
The EDL surface subphase covered the time period required for the
deflation and retraction of the airbags and deployment of the lander
petals. The spacecraft landed on its base petal, obviating the need
for righting itself. At 6:24 pm UTC (11:24 am PDT), engineering data
indicated that Pathfinder had fully deployed its petals and was
awaiting sunrise on Mars to power up.
| Spacecraft Id | MPFL |
| Target Name | MARS |
| Mission Phase Start Time | 1997-07-04 |
| Mission Phase Stop Time | 1997-07-04 |
| Spacecraft Operations Type | LANDER |
|
|
LANDER SURFACE MISSION
Mars Pathfinder's surface, or primary, mission phase began when its
lander petals were fully unfolded and the lander switched to a
sequence of computer commands that controlled its functions. This
phase ended 30 Martian 'sols' (each sol being 24.6 hours) after
landing. During this and the extended phases, a wealth of engineering
and science information was collected from the lander and the
instrument packages mounted on it. The IMP camera alone acquired
16,661 images.
| Spacecraft Id | MPFL |
| Target Name | MARS |
| Mission Phase Start Time | 1997-07-04 |
| Mission Phase Stop Time | 1997-08-03 |
| Spacecraft Operations Type | LANDER |
ROVER SURFACE MISSION
The Rover's primary mission lasted for seven Martian 'sols' from the
time of landing. One of the lander's airbags did not fully retract,
and was initially draped over the edge of the rover's petal. The
petal had to be partially closed and then reopened. This resulted in
a slight delay in the deployment of the rover, which occurred at 5:37
am, July 6, 1997 UTC, (10:37 pm, July 5, PDT). During the Rover's
primary and extended mission phases, the Rover traveled in a clockwise
direction around the lander. It acquired over 600 images and deployed
the APXS instrument at a number of rock and soil sites.
| Spacecraft Id | MPFR |
| Target Name | MARS |
| Mission Phase Start Time | 1997-07-04 |
| Mission Phase Stop Time | 1997-07-11 |
| Spacecraft Operations Type | ROVER |
LANDER EXTENDED MISSION
The Lander's extended mission ended with the last receipt of science
data from the surface on September 27, 1997. It is believed that a
combination of a dead battery and the increasing cold of approaching
Martian winter crippled the spacecraft's ability to communicate with
Earth.
| Spacecraft Id | MPFL |
| Target Name | MARS |
| Mission Phase Start Time | 1997-08-03 |
| Mission Phase Stop Time | 1997-09-27 |
| Spacecraft Operations Type | LANDER |
ROVER EXTENDED MISSION
The Sojourner rover was continuing to function at the time the Lander
ceased communicating with Earth. Upon loss of communication, the
Rover presumably acted on its stored commands, which directed it to
return to the Lander.
| Spacecraft Id | MPFR |
| Target Name | MARS |
| Mission Phase Start Time | 1997-07-11 |
| Mission Phase Stop Time | 1997-09-27 |
| Spacecraft Operations Type | ROVER |
Mission Objectives
Overview
The primary objective of the Pathfinder Project was to develop and
deliver a single flight system successfully to the Martian surface.
This would demonstrate the entry, descent, and landing design by
successfully acquiring and returning EDL engineering data and a
panoramic image of the Martian surface. The project had a number of
secondary programmatic, engineering, science, and technology
objectives which are listed below:
Programmatic Objectives
- Complete the development phase within a cost cap of $171M (real
year) (excluding the rover)
- Complete the mission operations and data analysis phase within a
cost cap of $14M (real year) (excluding the rover)
- Complete the development and operations of the rover within a
cost cap of $25M (real year)
- Establish management approaches and practices applicable for
fixed price, quick reaction, low cost projects.
Engineering Objectives
- Demonstrate simple, reliable, low cost cruise, entry, descent,
and landing systems.
- Monitor and evaluate lander performance in the Martian
environment.
- Provide significant inheritance to future Mars lander missions.
- Demonstrate the use of a rover surface vehicle as an instrument
deployment and operation mechanism.
Science Objectives
- Obtain data on the structure of the Martian atmosphere along the
entry and descent trajectory.
- Characterize the landing site surface geology and morphology at
sub-meter scale.
- Monitor meteorological conditions at the landing site.
- Investigate the elemental composition of rocks and surface
materials at the landing site.
- Constrain models of the interior of Mars by determining its rate
of precession.
Technology Objectives
- Investigate Mars' terrain feature classes.
- Investigate basic Martian soil mechanics parameters.
- Assess the performance of dead reckoning navigation sensors and
path reconstruction capabilities.
- Investigate the sinkage of rover wheels in Martian soil.
- Acquire all measurable rover engineering parameters during
surface operations.
- Monitor rover thermal behavior during surface operations.
- Assess performance of the rover imaging sensors.
- Investigate the effectiveness of UHF communications links on
Mars.
- Measure the abrasive qualities of Martian soil and dust.
- Assess the adherence of Martian dust to surfaces."
Related Information
The following links provide access to additional information about
topics related to the Mars Pathfinder mission. You must be connected
to the Internet for some of these links to work, since they are
located on the web site of the Central Node of the Planetary Data System.
Instrument Hosts
Mars Pathfinder Lander
Microrover
Flight Experiment (also known as the "Mars Pathfinder Rover" and
"Sojourner")
Instruments
Alpha
Proton X-ray Spectrometer (APXS)
Atmospheric
Structure Instrument / Meteorology Package (ASI/MET)
Imager for Mars Pathfinder (IMP)
Rover
Camera Left
Rover
Camera Rear
Rover
Camera Right
Targets
PDS Welcome to the Planets:
Mars
PDS High Level Catalog:
Mars,
Phobos,
Deimos,
Sun
References
COOKETAL1995
GOLOMBEK1997
GOLOMBEKETAL1997B